

이동형 로봇(대회용AMR로봇)
모델 : HY-AGV
1,850,000원
수량
주문 수량
0개
총 상품 금액
0원



COMPOUND ROBOT
myCobot, mechArm 로봇 팔을 장착하여 모바일 로봇과 협업 작업 및 공간을 확장하며 더 많은 작업을 완료할 수 있습니다.

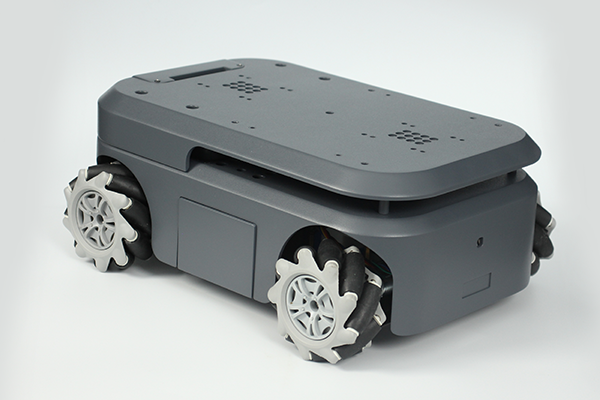
Omnidirectional movement
Competition-level Mecanum wheels, Fully Wrapped Metal Frame, Removable Split Structure.
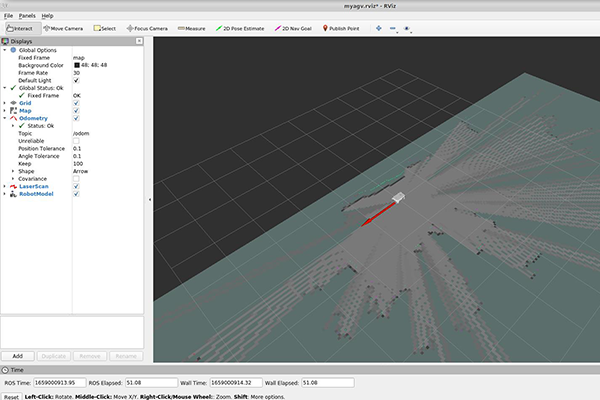
SLAM Lidar
The built-in gmapping and cartographer algorithms for ROS.Real-time mapping and scanning of Lidar, automatic path planning for obstacle avoidance and navigation.
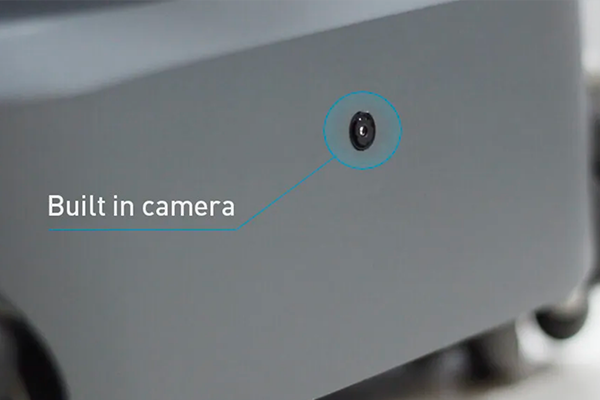
Built-in camera
5 million high-definition camera for object recognition and precise positioning.
MULTIPLE WAYS TO PLAY
The gamepad control supports multi-robots collaboration in real-time.

Additional extensions
Double-sided magazines on the body: increased batteries lengthen the working time; Can equip with the suction pump, and cooperate with the robotic arm to achieve more applications.
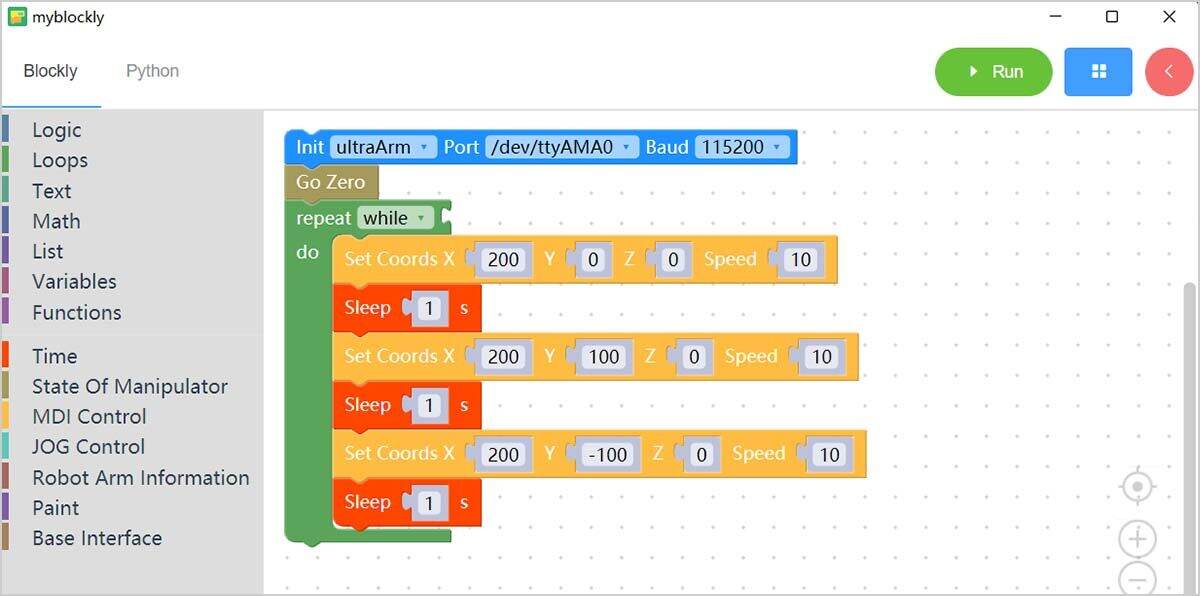
SOFTWARE ECOSYSTEM
블럭코딩을 위한 환경 구성 MYBLOCKLY
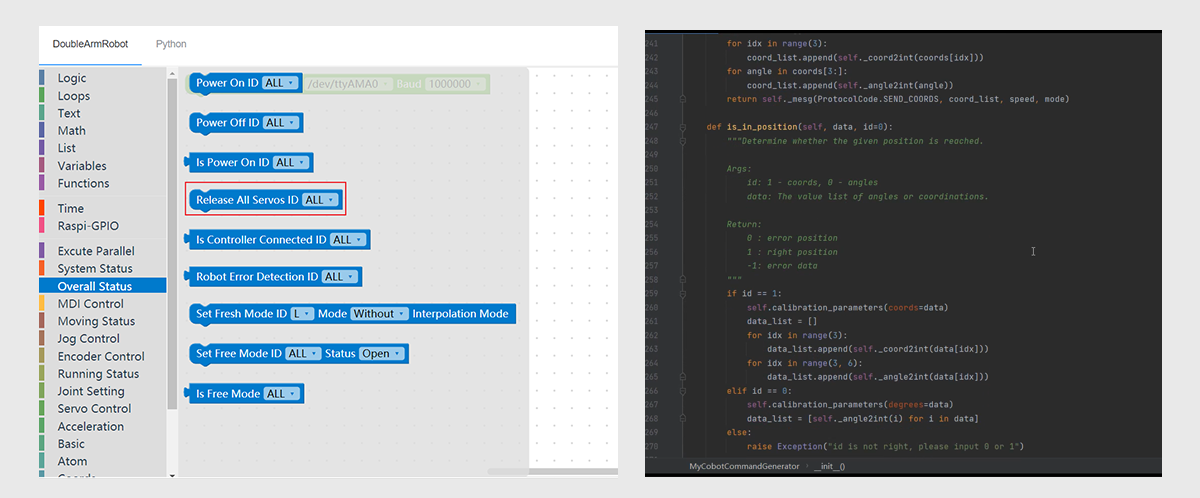

OPEN SOFTWARE CONTROL INTERFACES
전문 교육 및 연구개발을 위한 오픈소스 기반 소프트웨어 개발환경을 제공합니다. 특히 애플리케이션을 기반으로 물체인식, 객체탐지, 얼굴 인식, 이미지 인식 등과 같은 AI 애플리케이션 구현에 최적화 환경을 지원합니다.
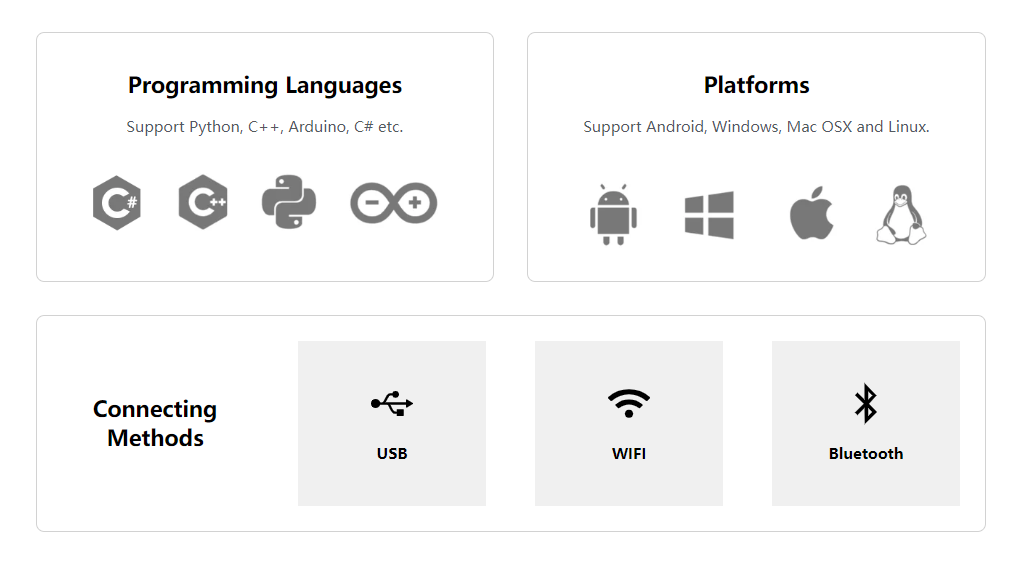
Python, Visul Blockly Programming, ROS개발환경 지원
AGV와 로봇의 연결
자율물류이동로봇(AMR)과의 연동을 통해 물체이동, 자율주행, 객체탐지 및 인식 등 다양한 어플리케이션 기능을 제공합니다.

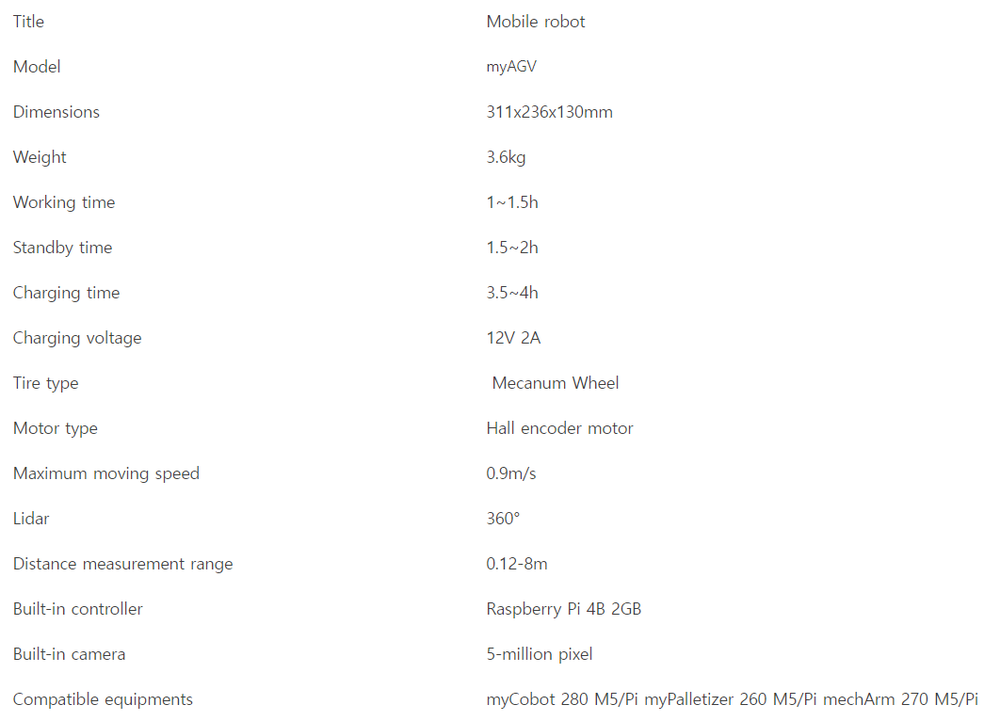
Specifications
이동형 로봇(대회용AMR로봇)
1,850,000원
수량
주문 수량
0개
총 상품 금액
0원